Finite Element Method
The finite element method is a numerical technique used to solve complex engineering and physical problems. It is a powerful tool that allows for the accurate prediction of the behavior of a system under a wide range of conditions, making it an essential tool for engineers and scientists working in fields such as structural analysis, fluid dynamics, and electromagnetics.
By the end of this tutorial you will be able to implement the finite element method in Python and apply it to solve a simple 2D structural problem.
All the code can be found here.
Introduction
The Finite Element Method works by dividing a physical space into different elements and applying the governing equations to each element. This is very useful for complex geometries or boundary conditions where obtaining an analytical expression is not feasible.
Although FEM can be applied to many different physical problems, it is most commonly used in structural analysis. We will develop the FEM for structural analysis in 2D.
In this example the structural case will be a 2D rectangular plate () with a hole of diameter, fixed on one side and subjected to a constant tension force of on the opposite side:
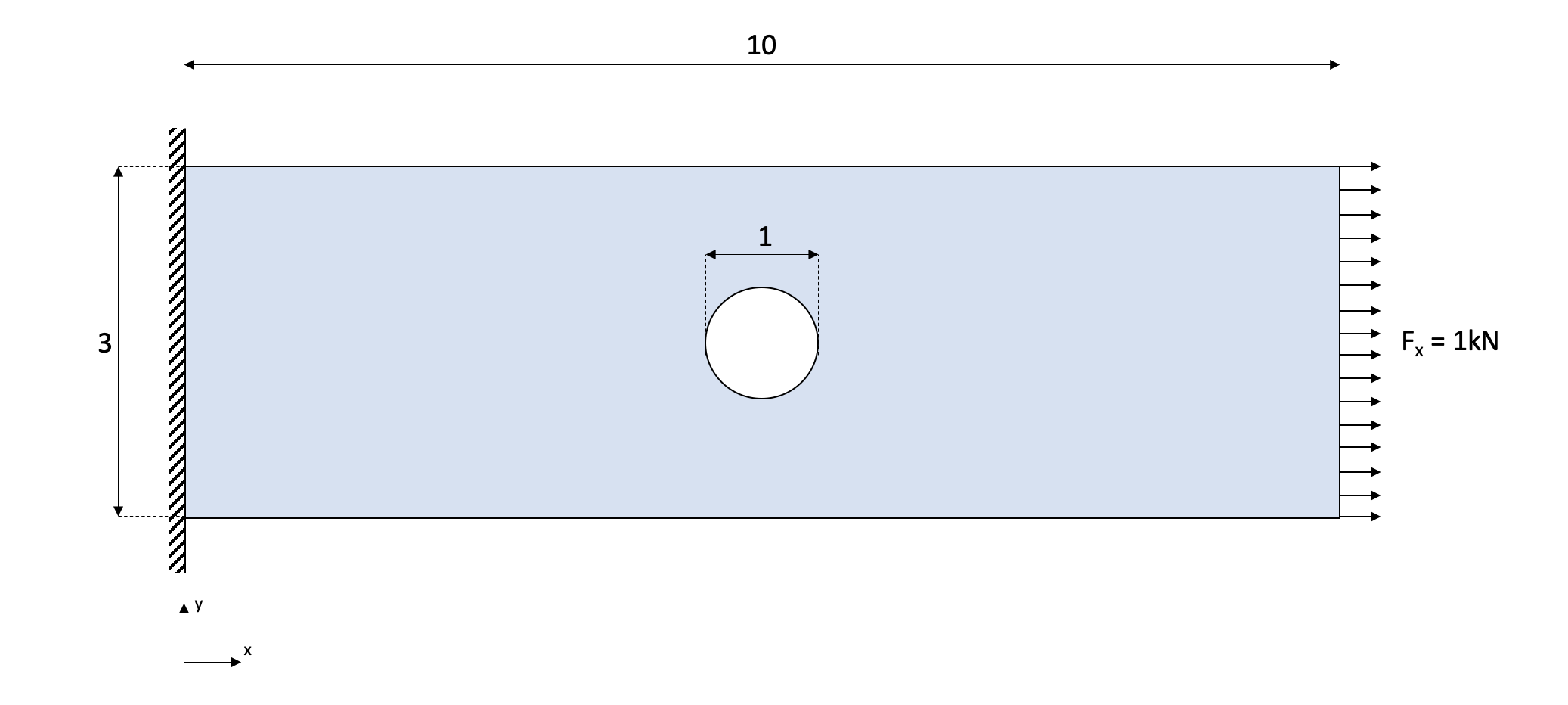
To simplify the calculations, 3-node triangular elements will be used.
The main equation in the FEM for structural analysis is:
Where is the displacement vector, is the force vector, and is the stiffness matrix. For the rest of the tutorial the force vector will be expressed as the sum of the external forces () and the reaction forces ():
While displacements and forces are intuitive to understand, the stiffness matrix is more abstract. It can be understood as the resistance to deformation — analogous to the spring constant () in Hooke’s law:

Requirements
pip install numpy pygmsh gmsh pygletimport numpy as np
from math import *
import drawMesh
import pygmsh
import gmshMesh
Splitting the geometry into elements and nodes can be done manually, but it becomes exponentially difficult for complex geometries and finer mesh resolutions. We use gmsh, a powerful meshing tool.
The mesh resolution is defined in resolution. Lower values create more elements and give better results at higher computational cost.
gmsh.initialize()
rect_width, rect_length = 3.0, 10.0
resolution = 0.1
geom = pygmsh.geo.Geometry()
circle = geom.add_circle([5, 1.5, 0], radius=0.5, mesh_size=resolution * 0.5, make_surface=False)
rect = geom.add_polygon(
[
[0.0, 0.0, 0],
[0.0, rect_width, 0],
[rect_length, rect_width, 0],
[rect_length, 0.0, 0],
],
mesh_size=resolution,
holes=[circle]
)
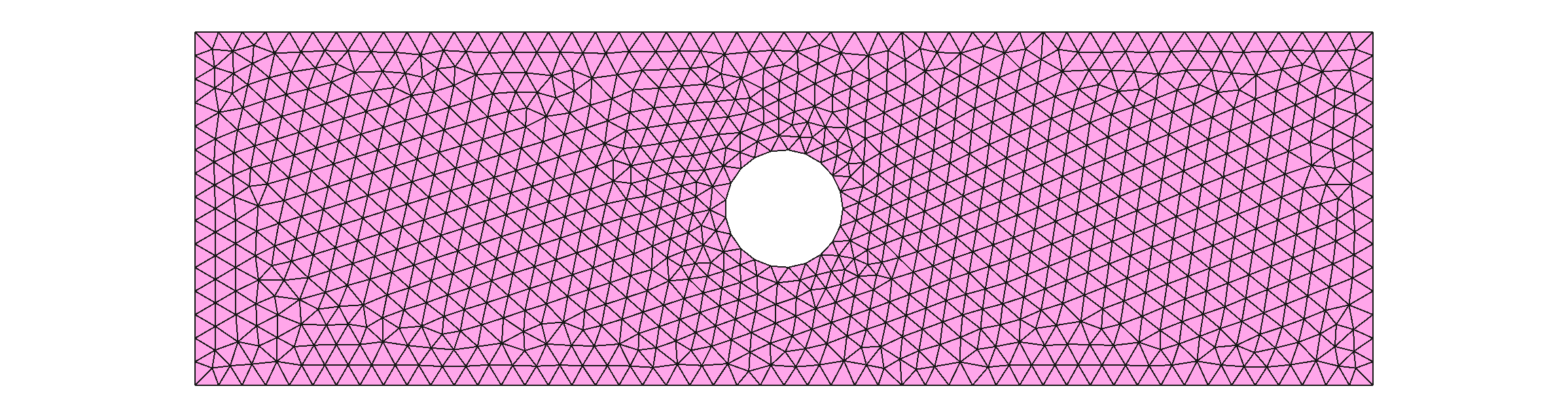
mesh = geom.generate_mesh(dim=2)
geom.__exit__()The resulting mesh looks like this:
Node
The Node class represents a node in the mesh. It stores the node’s coordinates, external forces, reaction forces, and displacements.
class Node:
def __init__(self, id, x, y):
self.id = id
self.x, self.y = x, y
self.fx, self.fy = 0.0, 0.0
self.rx, self.ry = 0.0, 0.0
self.dx, self.dy = None, None
@property
def dfix(self):
return self.dx == 0.0 and self.dy == 0.0
@property
def externalForce(self):
return self.fx != 0.0 or self.fy != 0.0
def __eq__(self, obj):
return (self.x == obj.x) and (self.y == obj.y)Element
Each element contains three nodes. The nodes are ordered counter-clockwise in orderCounterClock(). Each element stores a stress () and strain () attribute:
class Element:
maxColorVal = -9.9e19
minColorVal = 9.9e19
colorFunc = lambda x: x
def __init__(self, id, nodes):
self.id = id
self.nodes = self.orderCounterClock(nodes)
self.stress = None
self.strain = None
self.colorVal = 0
self.getArea()
def getde(self):
de_ = []
for n in self.nodes:
de_.append(n.dx)
de_.append(n.dy)
self.de = np.array(de_)
return self.de
def getColor(self):
try:
x_ = float(self.colorVal - Element.minColorVal) / (Element.maxColorVal - Element.minColorVal)
except ZeroDivisionError:
x_ = 0.5
x = Element.colorFunc(x_)
blue = int(255 * min(max(4 * (0.75 - x), 0.), 1.))
red = int(255 * min(max(4 * (x - 0.25), 0.), 1.))
green = int(255 * min(max(4 * fabs(x - 0.5) - 1., 0.), 1.))
return (red, green, blue)
def getArea(self):
x1, y1 = self.nodes[0].x, self.nodes[0].y
x2, y2 = self.nodes[1].x, self.nodes[1].y
x3, y3 = self.nodes[2].x, self.nodes[2].y
result = 0.5 * ((x2*y3 - x3*y2) - (x1*y3 - x3*y1) + (x1*y2 - x2*y1))
if result == 0:
result = 1e-20
self.area = result
return result
def getBe(self):
x1, y1 = self.nodes[0].x, self.nodes[0].y
x2, y2 = self.nodes[1].x, self.nodes[1].y
x3, y3 = self.nodes[2].x, self.nodes[2].y
B = (0.5 / self.area) * np.array([
[(y2-y3), 0, (y3-y1), 0, (y1-y2), 0 ],
[0, (x3-x2), 0, (x1-x3), 0, (x2-x1) ],
[(x3-x2), (y2-y3), (x1-x3), (y3-y1), (x2-x1), (y1-y2) ],
], dtype=np.float64)
self.Be = B
return B
def getKe(self, D):
Bie = self.getBe()
Ke = self.area * np.matmul(Bie.T, np.matmul(D, Bie))
self.Ke = Ke
return Ke
def orderCounterClock(self, nodes):
p1, p2, p3 = nodes[0], nodes[1], nodes[2]
val = (p2.y - p1.y) * (p3.x - p2.x) - (p2.x - p1.x) * (p3.y - p2.y)
nodes_ = nodes.copy()
if val > 0:
nodes[1] = nodes_[0]
nodes[0] = nodes_[1]
assembly = []
for n in nodes:
assembly.append(int(n.id * 2))
assembly.append(int(n.id * 2) + 1)
self.assembly = assembly
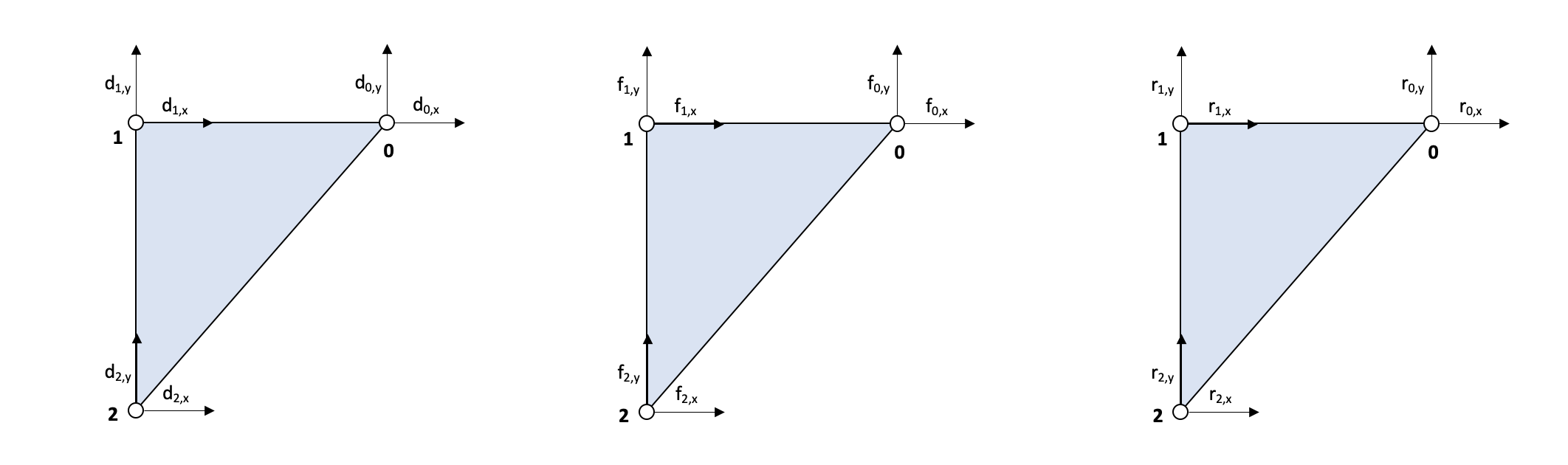
return nodesIt is important to distinguish between global and local variables. Element numbers are denoted with a superscript and node numbers with a subscript. For example, the local point 0 of element 4 is denoted . Note that .
The force-displacement equation for an element is , where:
The element stiffness matrix is obtained from the weak form of the elasticity problem:
The Hookean matrix relates strain and stress taking into account the material properties. The matrix relates the displacements at the nodes to the gradient of the displacement function :
The displacement function interpolates the node displacements across the element space, such that at each node the function matches the displacement.
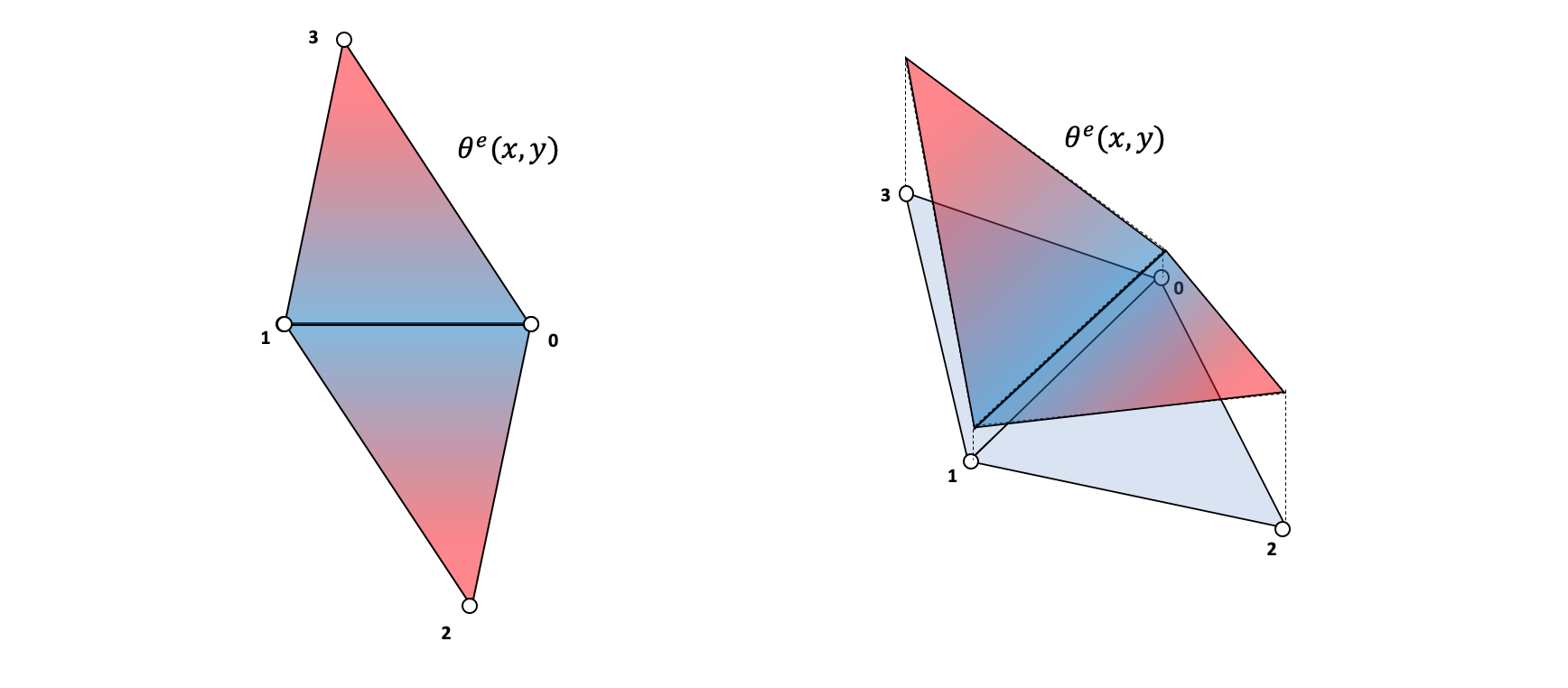
For triangular elements, the matrix is:
Since is constant along the element surface, we can simplify the stiffness matrix to:
Preprocessing
Extracting mesh data
The mesh contains points and cells data. Each row in cells contains the indices of the three points forming that element.
meshCells = mesh.cells[1].data - np.full(np.shape(mesh.cells[1].data), 1, dtype=np.uint64)
meshPoints = mesh.points[1:]
nodes = [Node(i, point[0], point[1]) for i, point in enumerate(meshPoints)]
elements = []
for i, cell in enumerate(meshCells):
elements.append(Element(id=i, nodes=[nodes[i] for i in cell]))Material properties
The Hookean matrix can be calculated from the Young’s modulus () and Poisson’s ratio ():
Using the material properties of steel:
v = 0.28 # Poisson ratio
E = 200.0e9 # Young's modulus (Pa)
D = (E / (1 - v**2)) * np.array([
[1, v, 0],
[v, 1, 0],
[0, 0, (1 - v) / 2],
])Boundary conditions
for i, node in enumerate(nodes):
if node.x == rect_length: # Right side: apply tension
node.fx = 1.0e3
elif node.x == 0.0: # Left side: fix displacement
node.dx, node.dy = 0.0, 0.0
node.rx, node.ry = None, None # Reaction forces are unknownsMatrix assembly
The global stiffness matrix is the sum of all element stiffness matrices:
Note that : the local matrix has shape while the global one has shape . The assemblyK function maps each element’s local stiffness matrix into the global one:
def assemblyK(K, Ke, nodeAssembly):
for i, t in enumerate(nodeAssembly):
for j, s in enumerate(nodeAssembly):
K[t][s] += Ke[i][j]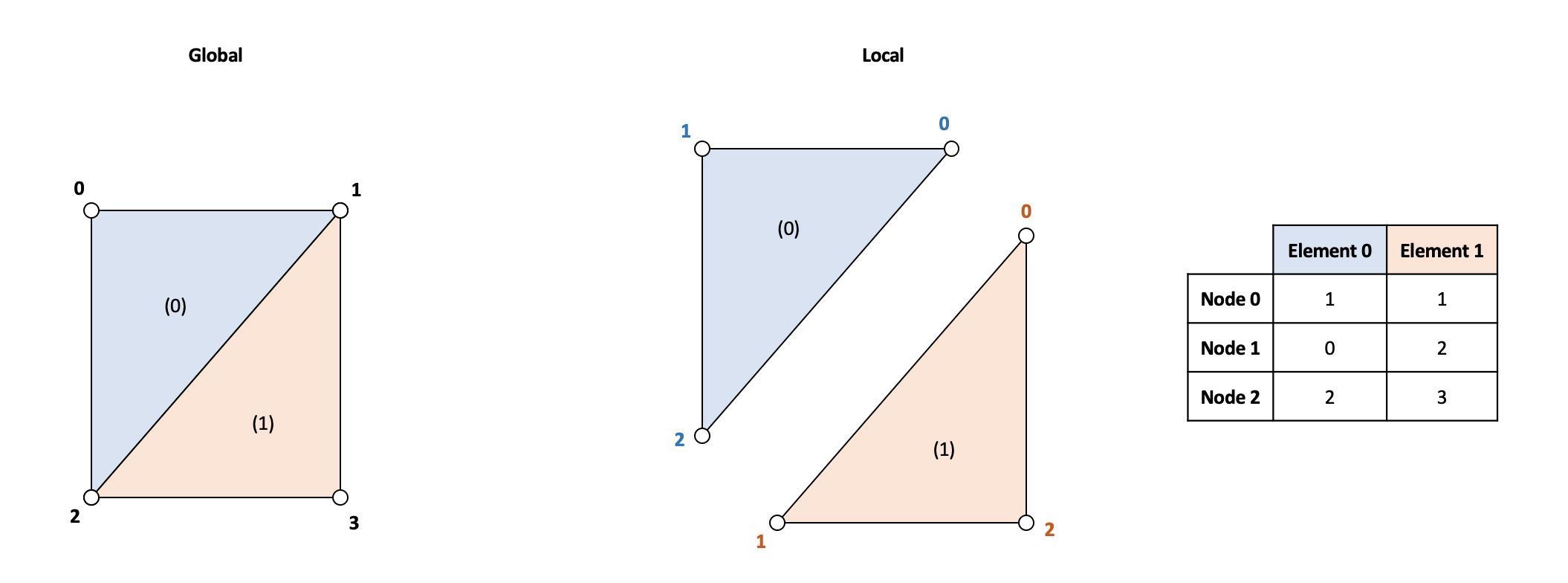
Nnodes = len(nodes)
K = np.zeros((Nnodes * 2, Nnodes * 2))
for e in elements:
Ke = e.getKe(D)
assemblyK(K, Ke, e.assembly)Build the force, reaction, and displacement vectors:
f = np.zeros((int(2 * Nnodes), 1))
d = np.full((int(2 * Nnodes), 1), None)
r = np.full((int(2 * Nnodes), 1), None)
rowsrk, rowsdk = [], []
for i, node in enumerate(nodes):
ix, iy = int(i * 2), int(i * 2) + 1
f[ix], f[iy] = node.fx, node.fy
d[ix], d[iy] = node.dx, node.dy
r[ix], r[iy] = node.rx, node.ry
if node.dx is None:
rowsrk.append(ix)
else:
rowsdk.append(ix)
if node.dy is None:
rowsrk.append(iy)
else:
rowsdk.append(iy)Solver
We partition the system of equations by known and unknown variables. For unknowns, we separate (unknown displacements) and (unknown reaction forces) from their known counterparts. The system becomes:
Since the known displacements are zero, this simplifies to:
KB = np.zeros((len(rowsrk), len(rowsrk)))
KA = np.zeros((len(rowsdk), len(rowsrk)))
fk = np.array([r[i] for i in rowsrk]) + np.array([f[i] for i in rowsrk])
dk = np.array([d[i] for i in rowsdk])
for i in range(np.shape(KB)[0]):
for j in range(np.shape(KB)[1]):
KB[i][j] = K[rowsrk[i]][rowsrk[j]]
for i in range(np.shape(KA)[0]):
for j in range(np.shape(KA)[1]):
KA[i][j] = K[rowsdk[i]][rowsrk[j]]
du = np.matmul(np.linalg.inv(KB), fk)
fu = np.matmul(KA, du)Postprocessing
Assign the solved displacements back to the nodes:
d_total = d.copy()
for i, d_solve in zip(rowsrk, du):
d_total[i] = d_solve
for i, n in enumerate(nodes):
ix, iy = int(i * 2), int(i * 2) + 1
n.dx = d_total[ix][0]
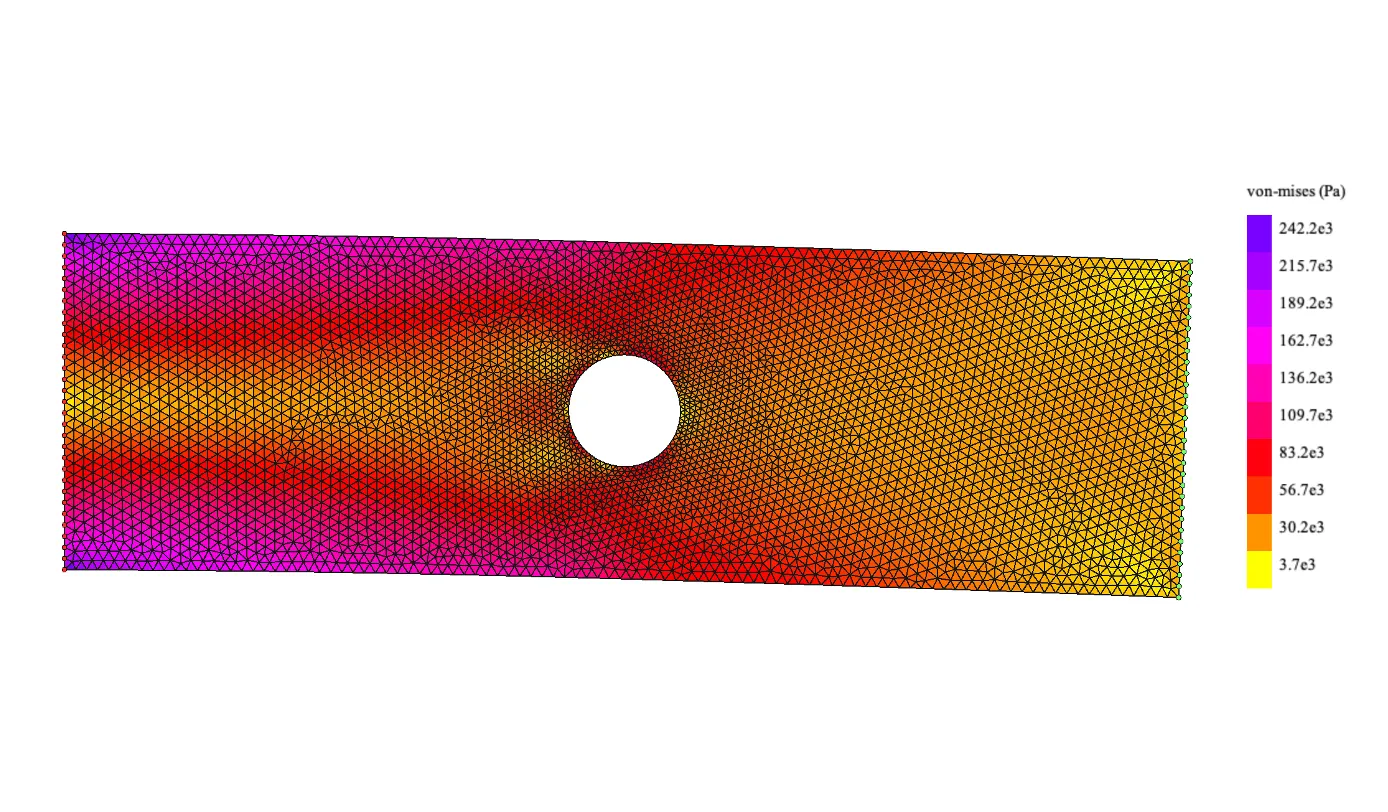
n.dy = d_total[iy][0]Von Mises stress
The von Mises equivalent stress is a good predictor for plastic yielding:
def calculateVonMises(sx, sy, sxy):
return sqrt(sx**2 + sy**2 + 3 * (sxy**2) - sx * sy)Calculate strains and stresses for each element using Hooke’s generalized expression:
Element.colorFunc = lambda x: x # Can be changed to exp(-x) for log scale
for i, element in enumerate(elements):
de = element.getde()
strain_e = np.matmul(element.Be, de)
stress_e = np.matmul(D, strain_e)
element.strain = strain_e
element.stress = stress_e
element.colorVal = calculateVonMises(element.stress[0], element.stress[1], element.stress[2])
if element.colorVal > Element.maxColorVal:
Element.maxColorVal = element.colorVal
if element.colorVal < Element.minColorVal:
Element.minColorVal = element.colorVal
render = drawMesh.MeshRender()
render.legend = True
render.autoScale = True
render.deform_scale = 1.0e5
render.legendTitle = 'von-mises (Pa)'
render.drawElements(elements)Results
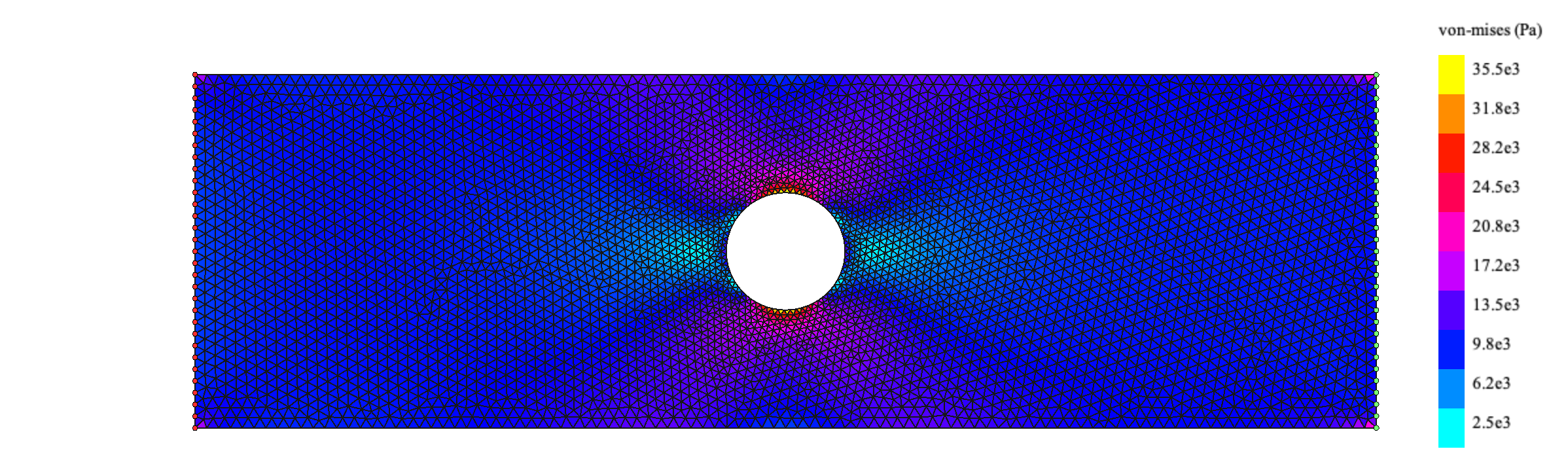
Applying horizontal tension (x-direction):
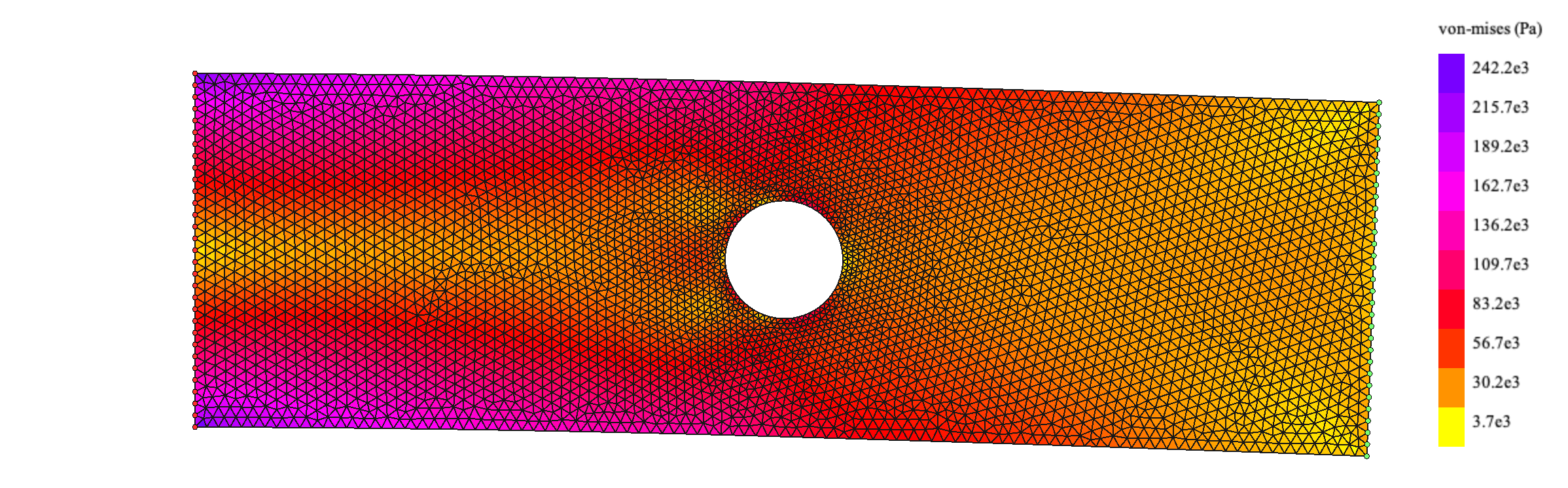
Applying vertical force (y-direction) instead:
Analytical validation
The classic problem of a plate with a hole under tension has a known analytical solution. In polar coordinates, with plate half-width and applied stress :
Plotting the analytical von Mises stress with the same parameters:
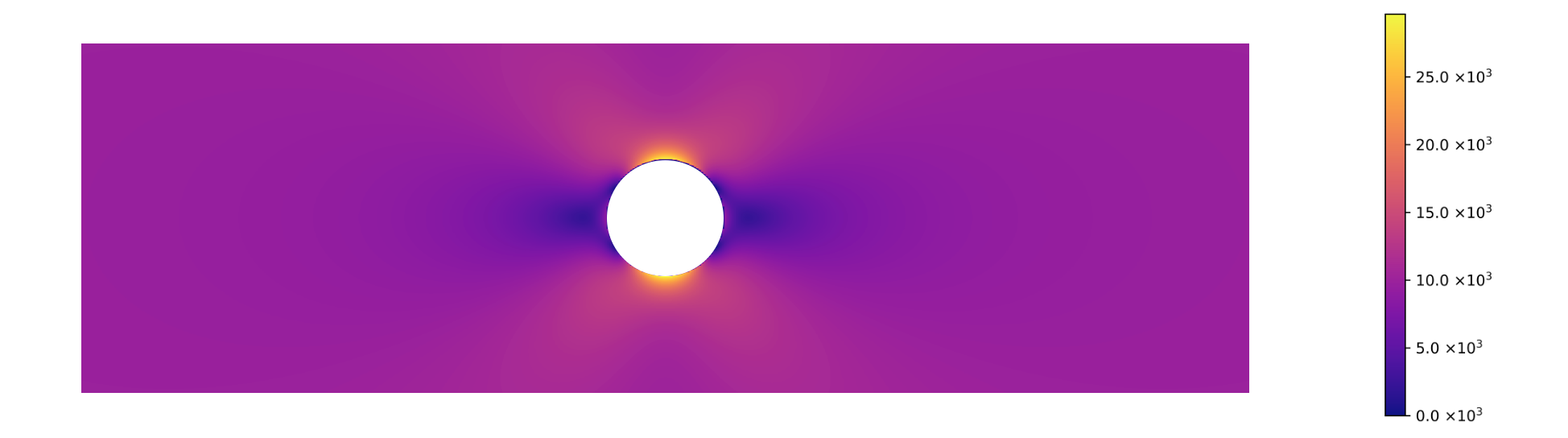
The FEM results match the analytical solution closely, which validates the implementation.
Last modified: 17 Jun 2026